As it is the sense of the project to fly a plane out of the air into water and back up in the air, I bought myself a so called flying boat. My choice was the Catalina from
Dynam.
The
Catalina is a “Flying Boat”. This means it has a Body like a ship and wings like a plane. Therefore it can land and start from water. This kind of plane was used in WW II. As Bombers, Rescue and transport planes. Some of them were incredibly huge. Today flying boats are mostly used for firefighting. The most famous of the firefighting planes is the
Canadair_CL-415.
 |
| The fuselage after my first corrections |
As I recieved my Catalina, I was very excited. My first plane able to land on water and swim. I’ve read tons of websites and saw many videos on youtube. One can not imagine all the things I wanted to modify. It should be completely waterproof, have one of the windows in the back able to be opened so I could put a camera there and film in the passenger view, the floats should be able to be retractable and the whole plane should appear in dark black and bright orange / red.
Today I finished most of the plane. It has none of the above features. Let me show you why and how I managed the building.
By the time I unpacked the Catalina, I realized that the quality of the pre made steps was quite poor. The glue did not keep the plane together properly, the colour was already split off in some spots and the GFK parts on the bottom looked like they were glued on by me instead of a professional.
 |
| The white line is glue that I had to add |
Most of all I was disturbed by those open gaps on the top of the fuselage. I used a specific glue for styrofoam and held the parts together with some duct tape. Then I left it for the night to dry. The next day as I removed the duct tape I had to realize that some of the colour stayed on the tape and left some ugly white stains on the plane.
 |
| The colour split off |
As I got instructed in several forums, I shortened the carrier of the floats by two to four centimeters and put it in a steeper angle so it would not function as a hook in the water when the plane would be taking off or landing. To do this I cut the floaters open, removed the carriers, shortened them and glued all back together. As you can imagine, the floaters are barely yellow now.
Meanwhile I ordered a reciever from my trusted RC-Store. A great tool from Spektrum, created for full GFK planes with a big range and super fast data transmission. It was as expensive as it sounds.
When it arrived, I put the parts of the catalina together as it was written in the description.
The description was quite simple. Every step has it’s image and there are not that many parts that one could get a problem. I only made some minor mistakes that I could have avoided if I’d have read the instructions properly.
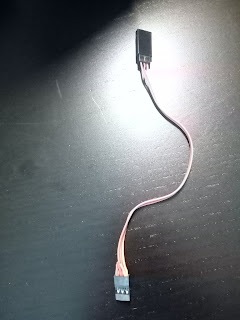 |
| Former Y-Cable now extension |
There is this thing with the servo cables that I would like to tell you.
The Catalina has a rudder, an elevator, two ailerons and two engines. In the wings there are two lights that you can turn on and off and set to blink or steady. In the package they deliver you one Y-Cable for the engines so they only take one slot of the reciever and one Y-Cable installed on the Rudder and the Elevator Servo Cables in the fuselage. Even with my little knowledge I knew that you can not put a Y-Calbe on these two Servos.
The Y-Cable takes the signal from the reciever and transmits it to two parts like for example the enginges. These two will therefore always run on the same speed. Or - if you combine the ailerons with a Y-Cable - the servos will always move in the same direction which makes the ailerons move in opposite directions because the servos are installed facing each towards its wing tip. If you combine the rudder and the elevator with the Y-Cable you will have some uncontrollable movement. For example if you put the Y-Cable on the Rudder slot, the rudder will go left and right while the elevator will go up and down accordingly. I should actually try that once I have an old plane ;)
So as I removed the Y-Cable from its wrong place, I thought the servo cables of the ailerons would be long enough so I cut one part of both of the Y-Cables off and used them to extend the cables from the engine to the reciever. Then I put one engine on the throttle slot. This will work as the normal enginge, providing the power to the reciever and getting the throttle signal. Then I took the second engine cable and cut off it’s red cable. The red cable is the + cable and brings power to the reciever. As I just said, the throttle cable already brings power. A second power source could damage the reciever. Then I put the second, castrated, engine on the gear. In the sender I used the “mixer” and put the following settings.
 |
| Cut + Cable from one engine |
- The gear does not have any lever or button as source. If it has a source, you will have trouble programming the following. Believe me, I tried.
- Throttle and gear move together.
- There are three flying modes: Flying, landing and water. As on my sender there’s no mode called “water”, I called this mode “throttle”. I put the three modes on a switch with three positions as one is always active.
- In mode flying, nothing special happens. The two engines move at the same pace.
- In mode landing, the ailerons move up. The exact percentage has yet to be found out. As default i put it to 75% while moving the elevator down for 10%. At this mode the ailerons have to go into the same direction so the servos will get different signals. Because of that I could not use the Y-Cable on the aileron servos.
- In mode throttle (water) the two engines move at a different rate as soon as I use the rudder. If the rudder goes to the left, the plane should move to the left. The right engine will turn 15% faster while the left engine will reduce its pace by 15%. Vice versa if the rudder moves to the right. This is used to steer the plane on water while the speed is to low for the rudder to have an effect. This was also the reason why I could not use the Y-Cable on the engines. They get different signals from the sender.
As I finished programming all this - with the Catalina I learned the most about settings and programming my sender - I wanted to try it out. I installed my super expensive reciever in the plane, bound it to the sender and got an error “beep” from both the controllers. Something was wrong.
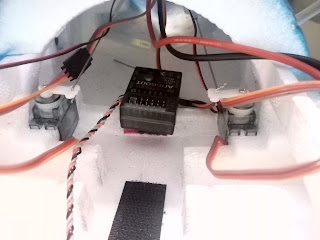 |
| Reciever on a mount so it should not get wet in case water enters |
Dynam is a chineese enterprise. The fuselage was in a bad quality so my first guess was:
Something is wrong with the engines or the controllers. After a bit of googling I found out that the problem might be the electricity. I tried with an other battery but had the same result. I tried to bind again, switch on with the throttle stick up and so far and so far. Nothing worked. After some more googling I learned that this beep emits when the throttle slot of the reciever does not recieve the throttle signal from the sender. I then changed all kind of settings on the sender and put the throttle cable in every slot of the reciever. Still, nothing changed. As I ran out of ideas I asked my friends from the Club and their answer was as simple as it can be: If the engines turn with an other reciever, it’s the reciever… It was the reciever. This super glorious, super expensive peace of plastic just does not work. I have to admit I was a bit disappointed. Now there’s a cheaper reciever in the plane.
The last thing I changed was the running direction of one of the engines. As default, most engines run to the right. Once you turn on the throttle the plane will have a momentum to the left. If you have two enginges this momentum will increase. Not double because the engines are not on the same axis but still. To avoid this, one of the engines has to turn towards the left.
Right now I’m thinking: the left engine has to turn to the right and the left one to the left so they don’t push / splash the water towards the fuselage but away from it… I’ll have to change that.
Today I’ll go to get the following parts from the store:
A set of propellers, one normal and one inverted (never use different propellers or engines on a multi engine plane. It might lead to crashes.)
As soon as I have these things installed I’ll run my first tests with my ugly but interesting flying boat. You’ll get videos and more pictures soon.
 |
| There might be a camera mounted on the front one day ;) |
P.S.: The features I intended to build in were not made because of the bad quality of the package. I will test now if it is even waterproof and how it flies. Maybe later I can tune it a bit.
Propellers that run opposite each other are hard to find. I told my seller to find some but until now he did not confirm my order.



































{kind=link}